研究メンバー
教授 神田 岳文(Takefumi Kanda)
助教 山口 大介(Daisuke Yamaguchi)
研究室Webサイト:http://www.act.sys.okayama-u.ac.jp
新しい機能を持ったメカトロニクスシステム(生産システム、医療福祉機器、科学測定機器など)の実現を目指し、デバイス(アクチュエータ・センサなど)の開発とシステム構築の両面から研究を進めています。特に、動きを生み出すデバイスであるアクチュエータについて、特徴ある固体アクチュエータ(圧電材料、形状記憶合金など)や流体アクチュエータ(空圧、油圧など)とこれらを動かすために必要なセンサなどの周辺技術を含めた関連する研究課題に取り組んでいます。
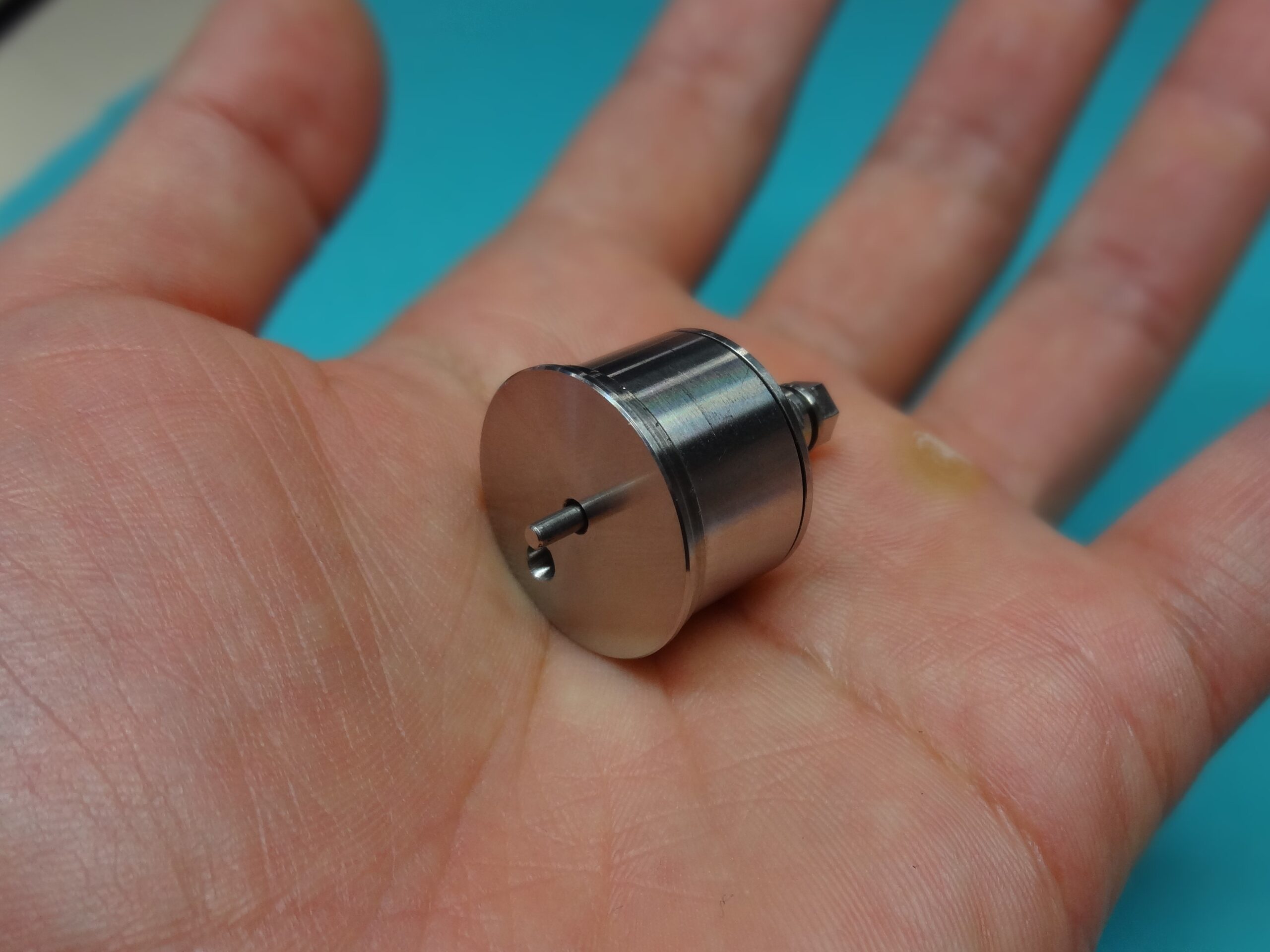
マイクロアクチュエータと応用デバイス
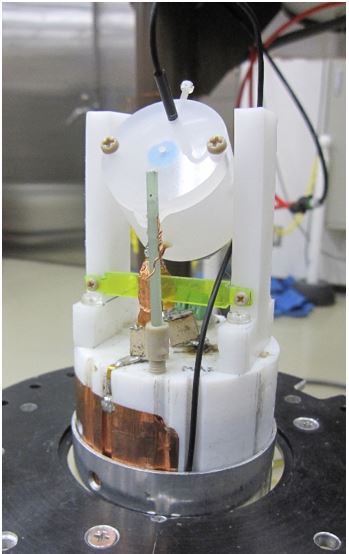
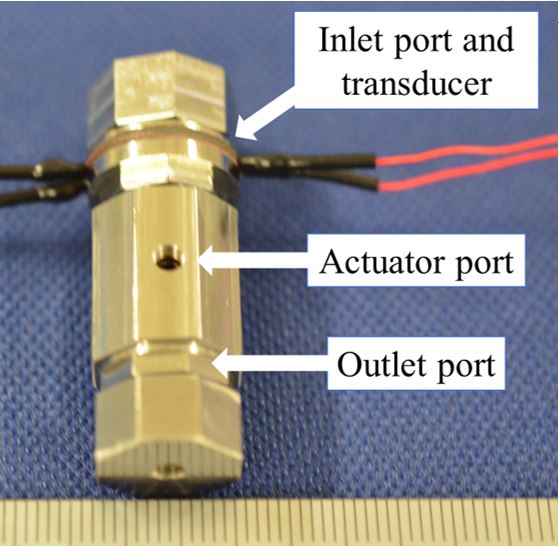
圧電素子などの機能性材料を用いたマイクロセンサ・アクチュエータに関する研究を行っています。特に、固体の機能性材料の微小変形や高周波振動を利用する小型のアクチュエータについて、機能性材料の成形・加工プロセスを含めた研究を進めています。圧電アクチュエータなどの固体の変形を利用するアクチュエータは、構造が比較的単純であり、マイクロ化に適しています。このような特徴を生かして、強磁場内を使用する分析装置内での試料操作を行うマイクロ超音波モータ、極低温環境で動く圧電アクチュエータ、流体駆動システムの小型化を目的とした小型流量制御バルブなどの研究を行っています。
マイクロリアクタ用流体操作デバイス
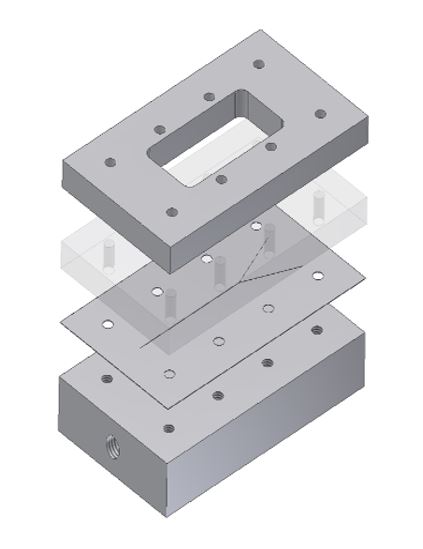
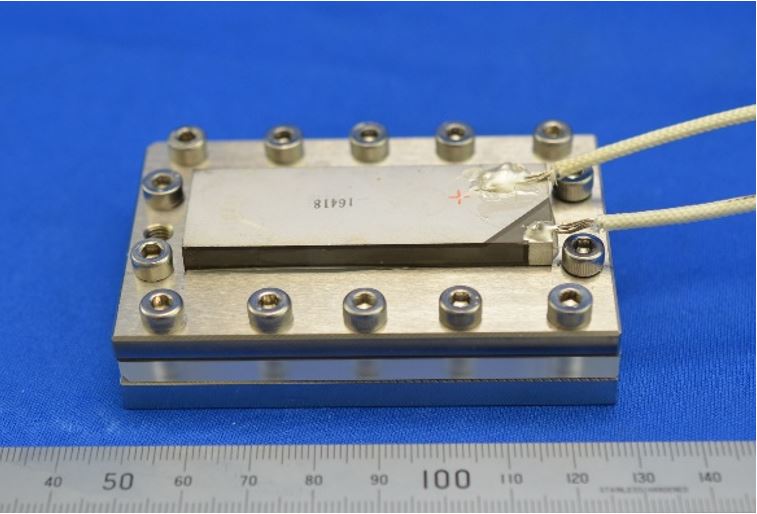
主としてマイクロ流路内での物体の特徴的な物理的・化学的作用を利用する小型の化学反応装置であるマイクロリアクタについて、能動的に動作する小型の流体操作デバイスを組み込んだアクティブマイクロリアクタシステムの実現を目指しています。このために、マイクロアクチュエータの技術を応用した流体操作デバイスに関する研究を行っています。高周波の振動を利用したナノエマルション生成、マイクロ液滴生成・操作、微粒子生成等の機能を実現するマイクロ流体デバイスとこれらを利用したシステムに取り組んでいます。
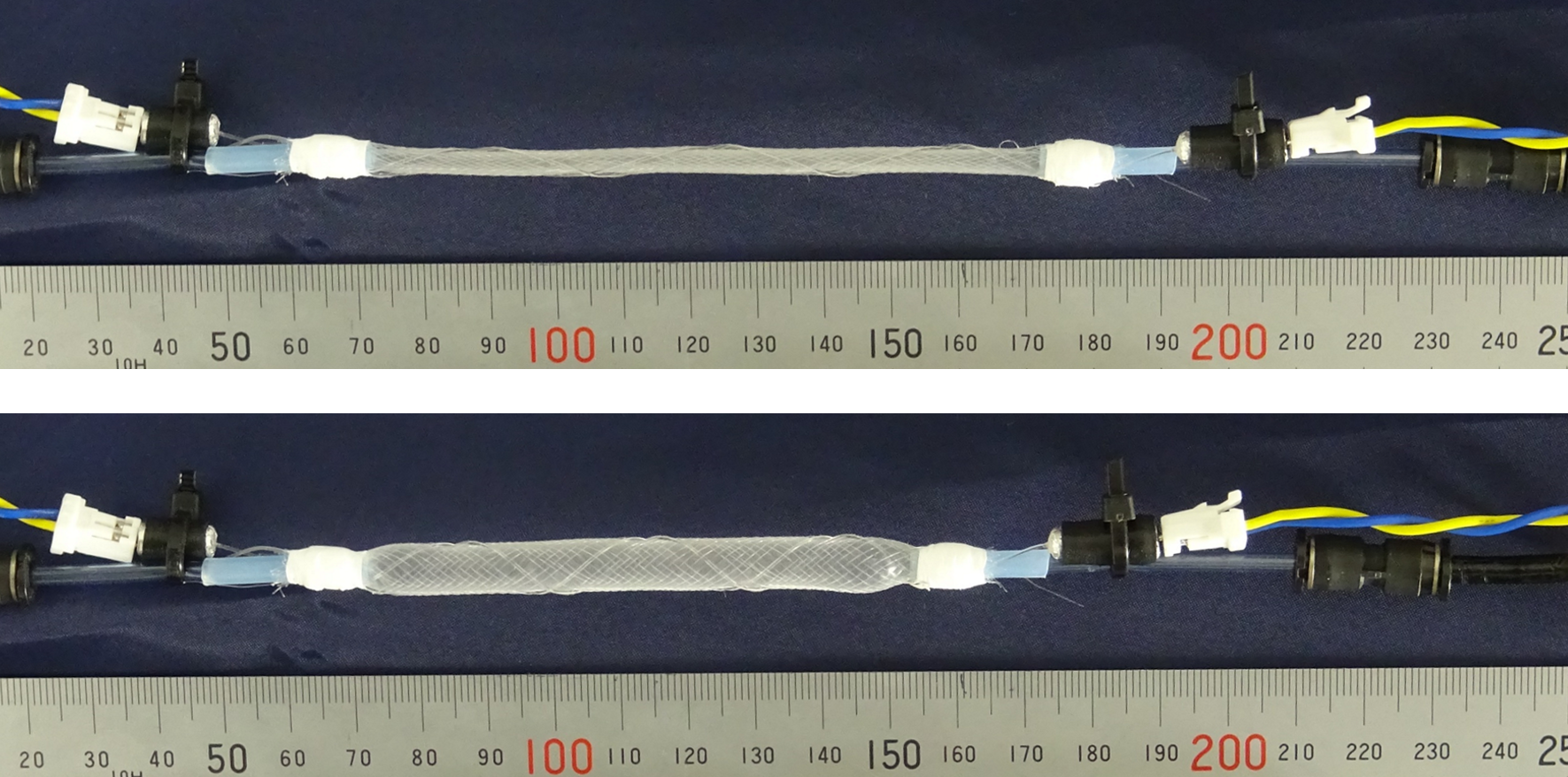
空気圧人工筋肉の高機能化
空気圧人工筋肉とは、ゴムと繊維で構成され空気圧によって駆動する「柔らかく」「力強い」アクチュエータです。小型化・集積化・高機能化など空気圧人工筋肉の利便性向上を目指した研究を実施しています。 例えば、小型化では、岡山県の地場産業である紐(ひも)の製造技術を適用することで直径1.8mmという量産可能な世界最小径の空気圧人工筋肉を実現しています(右上図)。ベンチャー企業を設立し販売を行うことで社会普及活動も行っています。 高機能化では、光ファイバや導電性繊維などの機能性繊維を人工筋肉を構成する繊維として利用することで人工筋肉の駆動状態をセンシングできるセンサ機能付きの人工筋肉を具現化しています(右下図)。

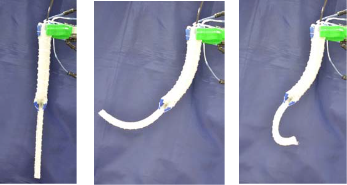
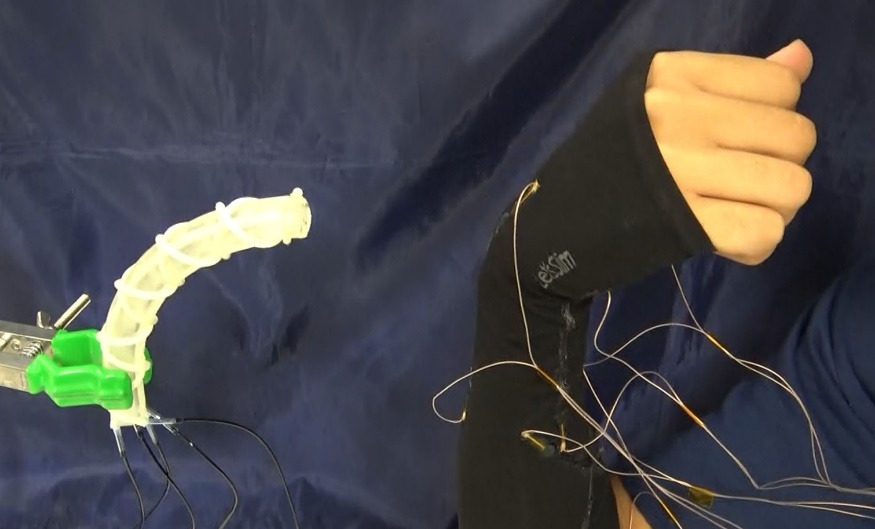
ソフトメカニズム
医療・福祉・農業などの分野では、ヒトや農作物などに対して安全性を確保しながら機能する機械システムが必要となります。「柔らかいアクチュエータを利用した柔らかいメカニズム」は安全性を実現する有用な手法といえます。本研究では、柔らかさを特徴とした大腸内視鏡挿入支援メカニズム・小児用筋電義手・柔軟ロボットアーム(下図)などを開発しています。柔らかい材料を主とした機構は、従来の金属から構成される機構では実現できない、やさしく、滑らかな動きを実現します。
極限環境用アクチュエータ
ヒトを含む一般的な生物が生存できる条件から大きく逸脱した極限環境(極高低温、汚染、高圧・真空、宇宙環境等)では、私たちの常識と大きく違った現象が観測され、先端科学分野への活用が進められています。そういった環境で活動するロボットや機器を実現するためには、動きを生み出す要素が必要不可欠です。そこで本研究室では、極限環境で使用可能な駆動源(アクチュエータ)を研究しています。例えば、極限環境用空圧ソフトアクチュエータは、人のような柔らかさを持ったアクチュエータです。ロボットに応用することによって、人が到達困難な環境において人の特性を取り入れたロボットの実現が期待されます。極低温環境で回転を行う超音波モータでは,室温とは異なった条件での測定が可能となることから、新しい分析・測定技術の確立が期待されています。このように、極限環境でモノに動きを与える新しい基盤技術について研究を行っています。

宇宙探査機用デバイス
宇宙産業の発展はめざましく、今後が大きく期待される分野です。宇宙産業における課題の1つにコスト(時間、金銭、機会)があります。従来の宇宙探査では大型探査機の輸送コストがかかるにもかかわらず、探査範囲が狭く探査の機会が限定されていました。そこで、小型ロボットを複数ばらまき分散・協働作業を行うことでより広範囲を機能的に一挙に探索する技術が提案されています。このような小型探査ロボットを実現・運用するための機械要素について研究をしています。また月・火星面基地などを建設するためには大量の資材が必要となります。現実的な建設のためには、可能なかぎり資材を現地調達し、輸送コストを減らした建設システムが必要です。そこで本研究室では、惑星の表土とフィルム材料を組み合わせた簡易建築資材に関して研究を行っています。このような未来の宇宙探査機・建設の基盤を支える技術の確立を目指しています。
