研究メンバー
教授 松野 隆幸 (Takayuki Matsuno)
准教授 戸田 雄一郎(Yuichiro Toda)
研究室Webサイト:https://www.cc.okayama-u.ac.jp/~surisys/
知能システムの 実現に必要なセンシング技術とそれに基づくパターン計測とその応用
人間や動物が何かを追いかけるときには、対象となるものを見失わないようにするため、まず目が動き、つぎに追いかけようとして体が動きます。この一連の動作は生物の知能的行動に基づいたもので、これを応用すれば、様々な環境で適応的に行動するロボットも夢ではありません。私たちの研究室では、人間の知能的な振る舞いをロボットシステムに取り入れることを目指して、ビジュアルサーボを中心技術とし水中ロボットをはじめとした様々な知能ロボットに関する研究に取り組んでいます。
ビジュアルサーボイング

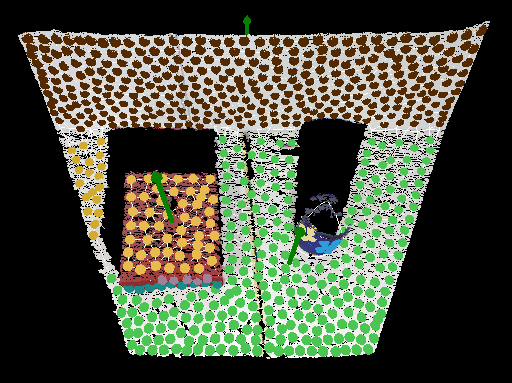
二つのカメラを用いた3次元空間センシング技術であるProjection based 3D Perception (Pb-3DP) を開発
近年、ロボットビジョンの分野では、視覚情報をロボットのフィードバック情報として用いるビジュアルサーボと呼ばれる運動制御が注目されている。視覚情報を用いることにより変化する環境や未知の環境でのロボットの活躍が期待される。視覚情報を利用するために、二つのカメラを用いた3次元空間センシング技術であるProjection based 3D Perception (Pb-3DP) を開発し、実時間での3次元空間認識を実現しています。
海中で活躍する自律型水中ロボット
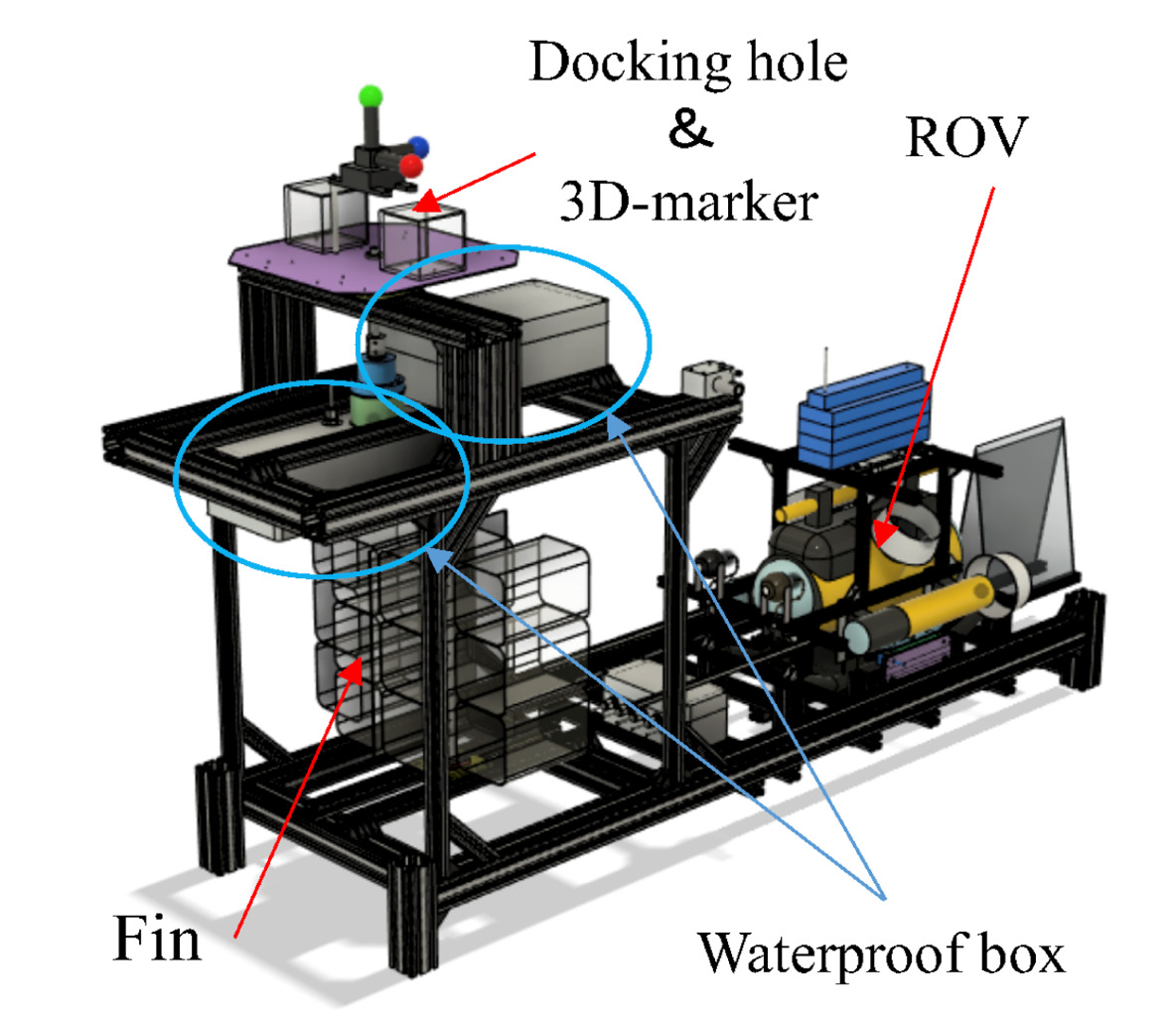
潮流を検知し潮流方向に回転するドッキングステーションを用いることで、様々な環境に適用可能なドッキング技術を目指しています。
海の環境で充電動作を長時間連続で行うことに成功
日本は、四方を海に囲まれた国であり、限りある資源を有効活用していくためには、海中を自律的に移動し、資源の探査や収集を行う水中ロボットの活躍が必要となってきます。そこで、私たちは自律的に海中を活動するための水中ロボットに関する研究をしています。例えば、水中ロボットが自動で長い時間活動するためには、ロボットのバッテリーが少なくなってきた時に、充電スポットに帰還し、充電を行わなければなりません。しかしながら、この充電プラグをコンセントに差し込むことは、海のような水中環境では、太陽光などの光環境や海流などが時々刻々と変化するため、ロボットにとって非常に困難な作業になります。そこで、私たちは、2台のカメラを用いることによって、動物のように環境を3次元的に精度良く、高速に認識する技術を実現し、実際の海の環境で充電動作を長時間連続で行うことに成功しています。このように、私たちは、海といった2度と同じ環境が存在しない極限環境下で、水中ロボットが自律的に活動するための新しい技術開発に挑戦しています。
ロボティックIVR (インターフェイスシステム学研究室と共同実施)
近年、ダ・ヴィンチに代表される医療用ロボットが発展しています。我々はX線装置やカテーテル等の器材の発達により進歩を遂げているInterventional Radiology(IVR)と呼ばれる手術法に注目しています。IVRとは、X線透視や超音波像、CTなどの画像診断技術を利用して体内にカテーテルや針を挿入し治療を行う手術法のことです。IVRには、開腹手術と比較すると侵襲性が低く、局所麻酔での治療が可能であるというメリットがあります。しかし、現状のCT透視下IVR手術では、CT装置の近くで医師が針を把持して治療を行っているため医師の放射線被曝が危惧されています。 そこで、CT透視下IVRを遠隔操作により実現するZerobotを開発しました。2018年に岡山大学病院において初めての臨床試験を行い、10例の患者さんにおいてロボットを用いて安全に針を刺入できることを確認しています。


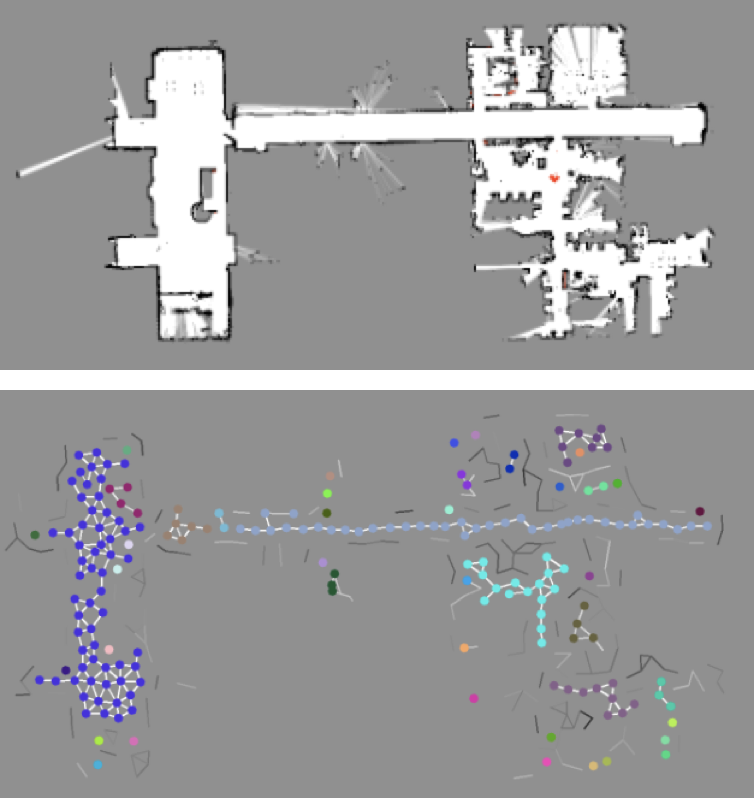
自己増殖型ニューラルネットワークを用いた環境認識
近年、様々な分野で人工知能技術の1つである深層学習などに大きな注目が集まっています。深層学習手法の多くは、人間がデータに教師値となる正解のラベルデータを与え学習を行う教師あり学習の手法が使われています。しかしながら、未知な環境において自律ロボットが活躍したり、ロボットが学習しつづけるためには、教師値がないデータを自ら学習し、活用していく必要があります。
本研究では、教師がないデータに対しても学習が可能なニューラルネットワークである自己増殖型ニューラルネットワーク(Growing Neural Gas: GNG)に関する基礎的な研究を行っています。本研究で提案しているGNGでは、従来のGNGではできなかった、複数の解釈(クラスタリング)結果を与える新しいGNGのモデルを提案しています。
さらに、動的未知な環境で、時系列計測データから状況に応じた環境情報の収集とロボットの移動や制御に必要な知覚情報の抽出を行いながら、注意を向けるべき対象に対して密なモデル化を行うと同時に、それ以外の対象に対しても疎なモデル化を行うといった生物が持つ能力に近い知覚能力を有した自律移動ロボットの実現を目指して研究を行っています。