研究メンバー
教授 亀川 哲志(Tetsushi Kamegawa)
准教授 下岡 綜(So Shimooka)
複雑な3次元空間を運動するヘビ型ロボット
生物の蛇はひものような単純な形態であるにもかかわらず,環境に合わせて多様な移動形態を見せます.これまでに,ヘビ型ロボットにおいても,蛇の推進原理を模倣した横うねり推進,サイドワインディング推進,縦波を伝播する尺取虫のような推進,また,ラテラルローリング推進など,様々な移動形態を実現してきました.特に,本研究室では,従来のヘビ型ロボットのもつ多様な移動形態に加え,円柱に巻きついて登る移動形態を実現するヘビ型ロボットを開発し,ヘビ型ロボットの移動空間を3次元に拡張することを目指しています.また,複雑狭隘な環境の中で,環境に適応して生物の蛇さながらに移動するロボットの実現を目指しています.こうして実現されたヘビ型ロボットは,災害現場や発電所などの配管設備の点検などで役立つことが期待されます.

災害現場を移動するヘビ型ロボット
災害対応レスキューロボット
現状の技術では,大規模災害で完全に倒壊してしまった建物の内部の様な極めて複雑で不定な環境を自律で調査するロボットを構築することはまだまだ困難な課題です.そこで,現実的な研究課題として,遠隔操縦タイプの移動ロボットをベースに,探索活動を支援するロボット技術をハードウェアの立場とソフトウェアの立場から追求しています.また,将来的にロボットが環境を自動認識するための技術や,自律移動するための技術についても研究をしています.なお,災害対応レスキューロボットが実現したとしても,普段から利用していないと,いざというときに使えないシステムになってしまいます.そのため,日常時と非日常時の連続性をもたせたシステム作りが重要となります.そのようなことも念頭にいれた”使える”システムを作ることが最終目的です.

遠隔地の情報収集を行う移動ロボット
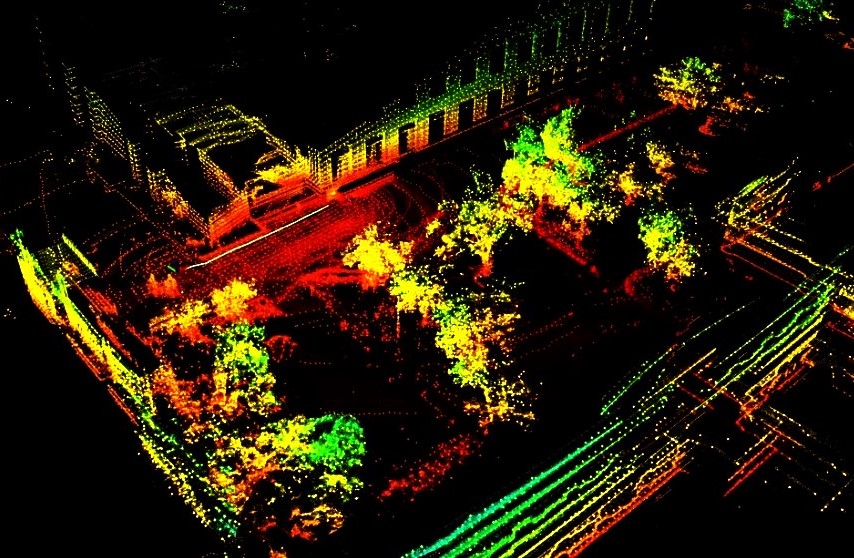
自律移動ロボットのための自己位置推定&環境地図作成
CTガイド下針穿刺用ロボットの開発
CTでリアルタイムに患者の体内を撮影して,高解像度な画像を見ながら医療用の針を刺して治療や検査を行う低侵襲な手技があります.患者さんにとってメリットの高い医療を提供できますが,X 線を発するCT ガントリ付近で手技を行う術者が日常的にX線で被ばくしてしまうことが問題でした.そこで我々は術者の被ばくをゼロにするため,術者の遠隔操作によりCT ガイド下に針穿刺をするロボット (Zerobot) の研究開発を進めています.これまでに,開発したロボットを用いて岡山大学病院で医師主導治験を実施するに至っています.これからも,患者さんに高度な医療を届けると同時に,医師の負担も軽減するための医療機器を研究開発していきます.

針穿刺ロボット(Zerobot)が臨床で使われている様子
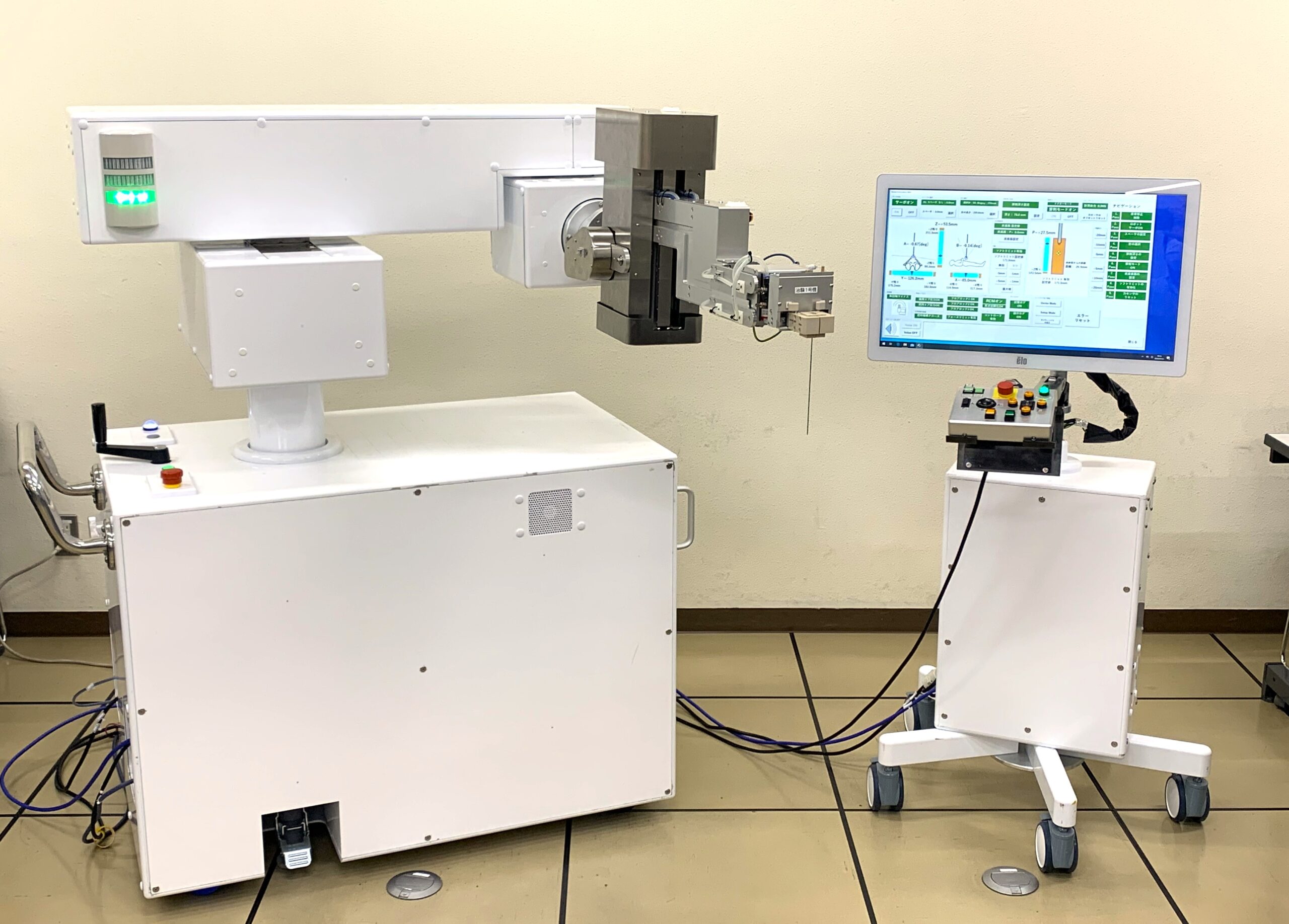
CTガイド下針穿刺ロボット(Zerobot)
柔軟で力強いソフトアクチュエータの開発とリハビリテーションの応用
少子高齢化社会の中,リハビリテーション(リハ)の需要が増加すると予想されています.しかし,リハに従事する理学療法士(PT)や作業療法士(OT)の不足と施術時間の制限から,患者への十分な運動量の確保が困難になっています.そこで,本テーマは不足している運動量を確保すること,PT・OTが行う手技を模倣した動作を患者に促すことで効果的にリハを行うことができるリハビリテーション機器の研究・開発をしています.現在,岡山大学病院の専門医やPT・OTとともに,手技を解析しながら足関節や前腕のリハビリテーション機器の開発に取り組んでいます.手技を模倣するためには柔軟な動きや患者の状態に合わせて動作を促す必要があるため,対象の人やものに合わせて動作するソフトアクチュエータの研究も行っています.その他にも,複雑な動きをソフトアクチュエータで実現するための機構の研究も取り組んでいます.
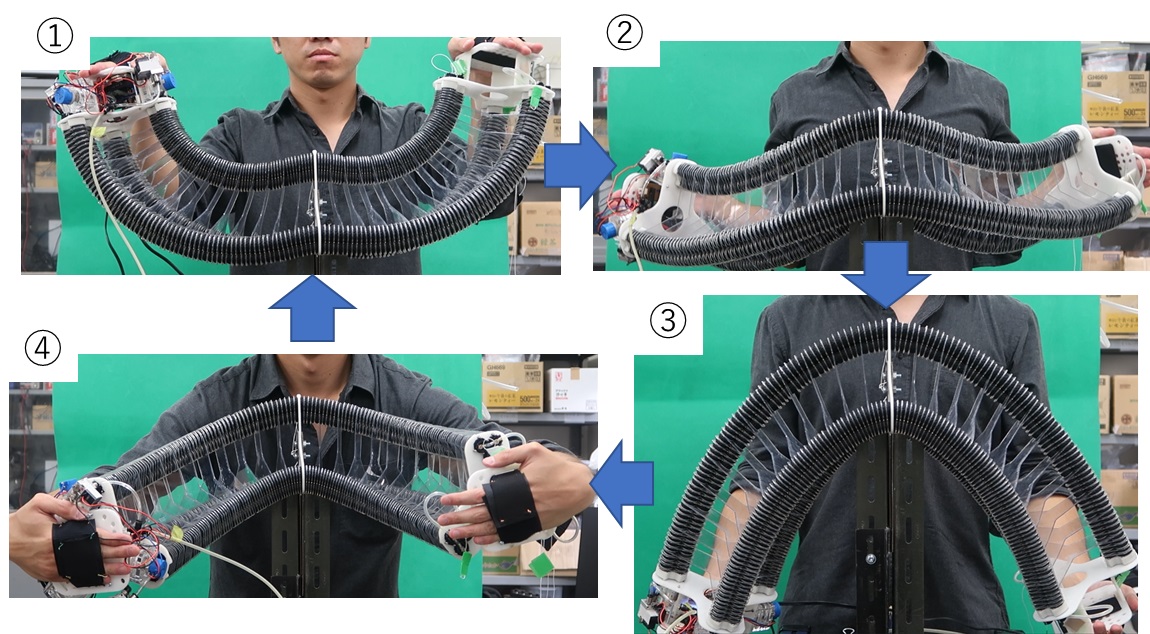
肩関節用リハ機器の動作の様子
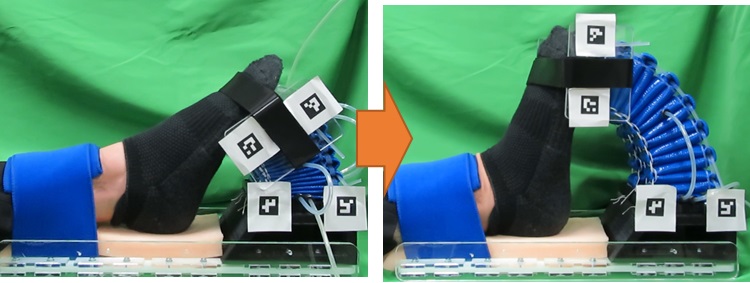
足関節用リハロボット
3軸回転できる球面モータの開発と球面減速機の開発
現在,一般に広く利用されているモータは 1 自由度しかありません.そのため,多自由度を得るには複数のモータと機構を組み合わせる必要があり,先端の機構が末端の機構の負荷になるため機構の質量が雪だるま式に増加していく恐れがあります.その結果,機構の大型化や複雑化,精度の低下といった問題が生じています.その課題を解決するために多自由度の動きが可能なアクチュエータの研究が進めています.本テーマでは,1つのアクチュエータで3自由度の動きができる球面モータの研究に取り組んでいます.また,モータと同様に減速機が必要になるため,3軸のあらゆる方向に減速可能な球面減速機の研究も行っています.より小型で高トルクが得られる球面モータも含めた機構を開発し,ロボットの関節やリアクションホイールなどの応用をめざしています.
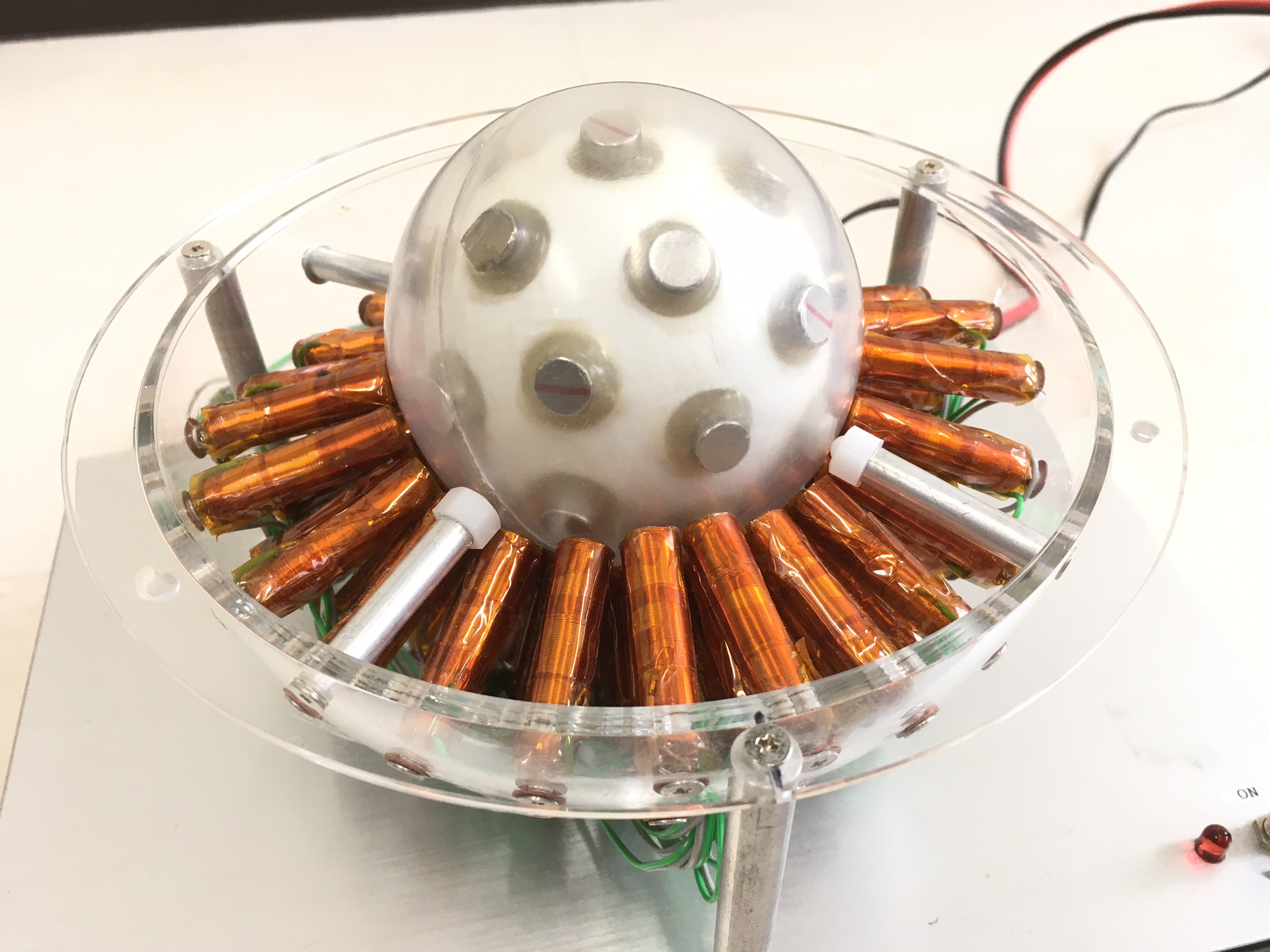
球面モータ
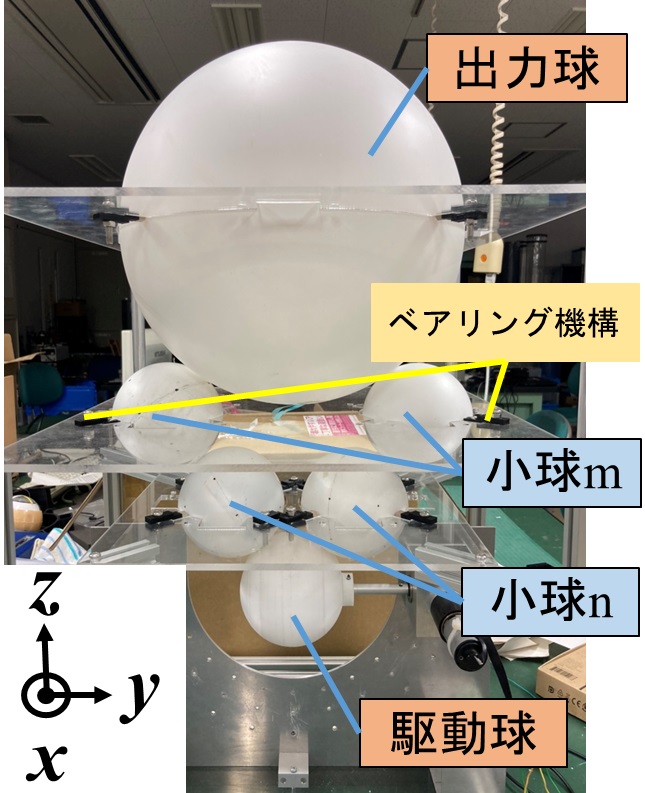
3軸あらゆる方向へ減速できる球面減速機