研究メンバー
教授 中澤 篤志(Atsushi Nakazawa)
研究室Webサイト:https://www-hci.sys.okayama-u.ac.jp/
人間が機械装置やロボットを自由自在に操作するためには、人間の意図を計測して理解し、また装置の状態を人間に伝えるヒューマン・マシン・インタフェースが重要 です。本教育研究分野では、画像やセンサーからAIを使って人の意図を理解したり、様々なロボットを使いやすくするインタフェースを研究しています。また、医療の高 度化や効率化のための医療支援システムや、優しい介護を実現するVR/MR技術、人と事前な対話が可能なコミュニケーションロボットシステム、人の角膜表面反射から周囲の認識を行う画像システム,画像認識により人の健康状態や食事の残渣などを自動推定するAIシステムなどを開発しています.
会話情報学:センシング・ AIに基づく人のインタラクションの理解
人は他者の性格や意図を表情,視線,しぐさなどから暗黙のうちに理解することで,他者との円滑なコミュニケーションを実現しています.我々のグループではこのような人の意図や性格をセンサ情報・画像認識・ AIなどを用いて計測,解析することで,人のコミュニケーションスキルを理解する研究を行っています.またその結果を使って,人=人,人=ロボットのコミュニケーションを促進,円滑にする技術を開発しています.具体的には,人とソーシャルロボットとのインタラクション技術,優しい介護コミュニケーションの理解やスキル伝達技術の開発を行っています.
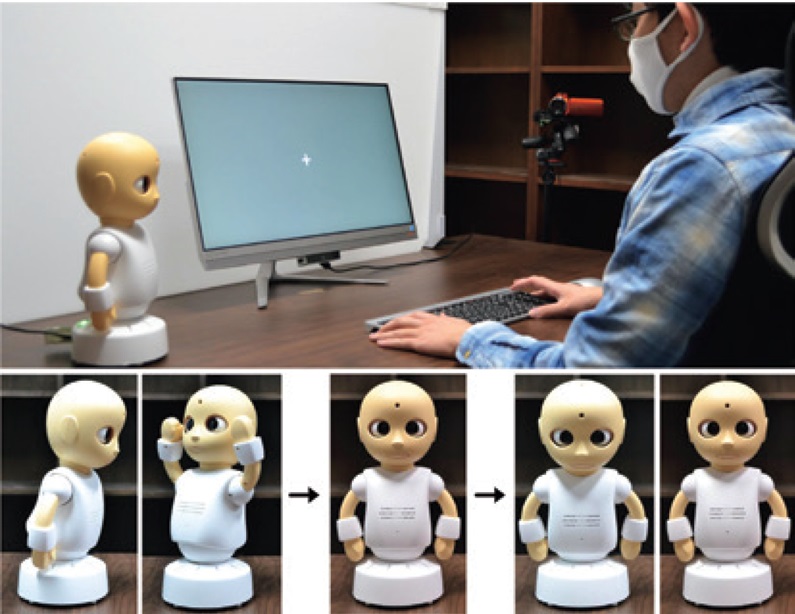
優しい介護インタラクションに関する研究
Researches on the Humanitude (TM): ‘tender’ nursing interaction
我々は「優しい介護」技術であるフランス発祥のケアコミュニケーション技法「ユマニチュード」に着目し,以下のような研究を行っています.
・介護動作をウェアラブルセンサや人工知能(AI)等を用いたスキルの定量化
・脳活動計測で「優しい介護」を⾏う際の情認知機構を理解
・得られた情報を統合して「優しい介護とは何か」を解明する
・XR(AR,VR)により開発された介護のスキル訓練システムの開発や定量的評価
また,岡山大学医学部や他大学の医療系・看護系学科,介護施設など,実際の医療教育現場やフィールドと連携してシステムの普及活動を行い,優しい看護が実現される社会を目指しています.

画像認識AIによる医療応用研究
Image Recognition AI for Medical Applications
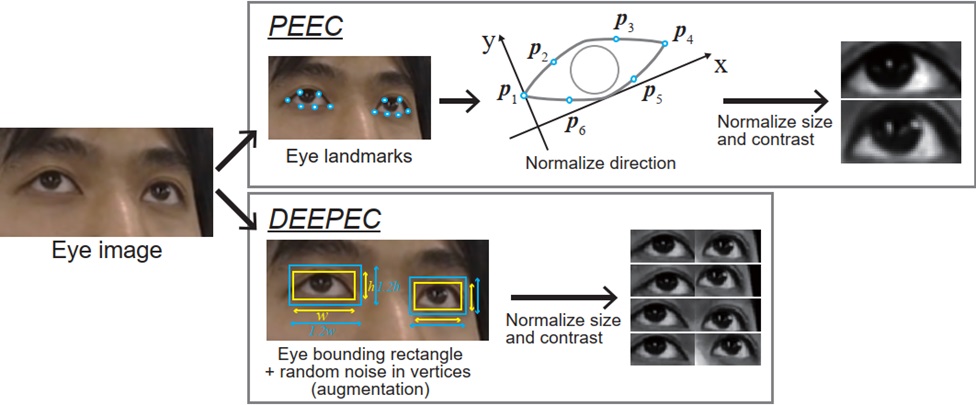
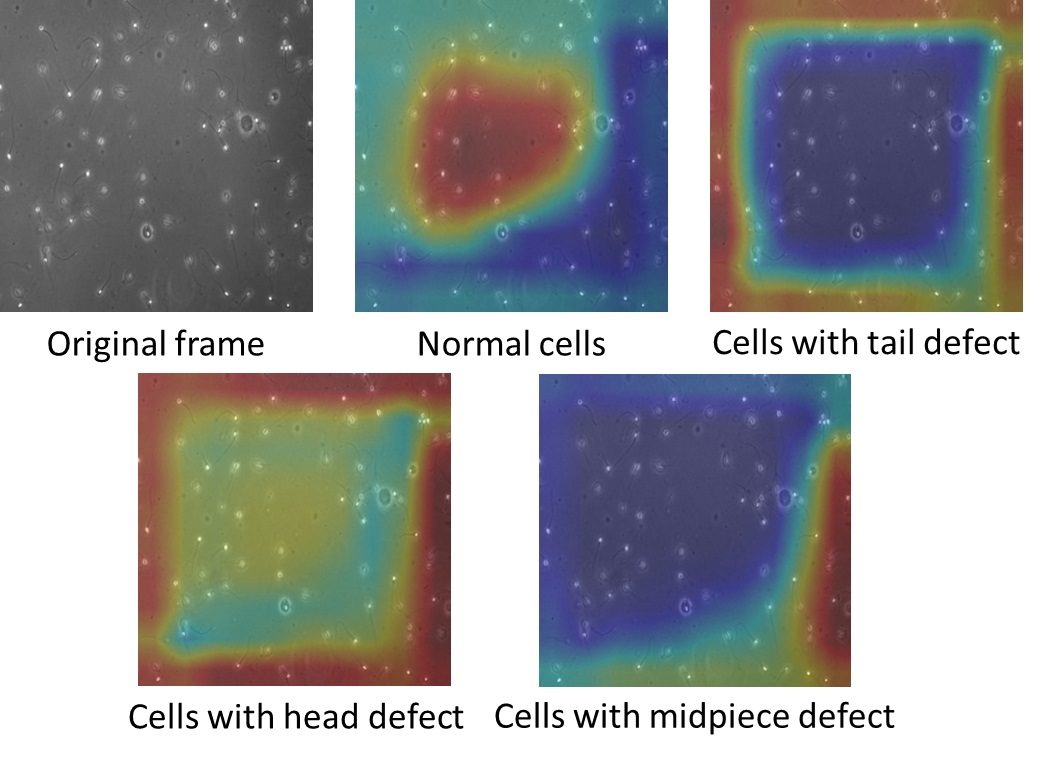
コンピュータービジョンや深層学習(ディープラーニング)技術を用いて,人の行動計測や医療応用技術を開発しています.具体的には,人の目(角膜)表面反射による視線の検出技術や周辺領域の認識技術,集団の人の視線行動を計測・認識することによる発表の質の自動評価手法,細胞追跡技術を用いた精液の質推定技術,看護現場で必要となる摂食残渣量の自動推定技術などを開発しています.