研究メンバー
教授 真下 智昭(Tomoaki Mashimo)
准教授 芝軒 太郎(Taro Shibanoki)
助教 出原 俊介(Shunsuke Izuhara)
研究室Webサイト:https://www.okayama-u.ac.jp/user/mechatro/
研究内容
メカトロニクスシステム学研究室では,新しいセンサやアクチュエータの創造的かつ基礎的な研究開発,それらの技術を用いたロボットや医療機器などの応用的な研究開発,さらにはそれらの周辺技術の研究開発に取り組んでいます.特に,圧電効果を駆動原理とするセンサ・アクチュエータに着目し,駆動理論などの基礎的研究から,新デバイスの設計開発評価,さらにはそれらを応用したロボットの制御などの応用的研究までを研究の範囲としています.
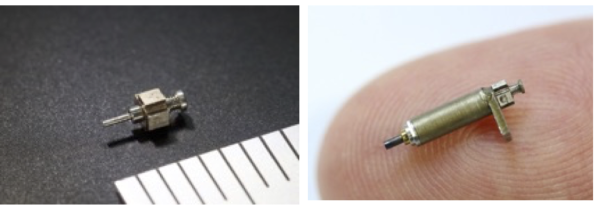
マイクロアクチュエータ
超音波モータは,トルク密度が高い(体積あたりのトルクが大きい)アクチュエータとして知られています.言いかえると,これは小さくても力が出るということです.小さい部品の加工方法,ハンドリング技術,組立技術など「マイクロのものづくり」を含めて,世界最小級のマイクロ超音波モータの研究開発を行っています.最近開発した約1mmのモータでは,最大40μNm以上のトルク(半径1mmで4g以上の力)を達成しています.これは小型のセンサや部品などを動かすのであれば十分なトルクです.また,回転型だけでなく直動型のマイクロ超音波モータや,0.5mm以下の超小型の超音波モータを開発し,駆動実験に成功しています.このような小型モータは,医療の現場での応用が期待されます.カテーテルや内視鏡などのマイクロ医療ロボットへの応用を目指して研究開発に取り組んでいます.
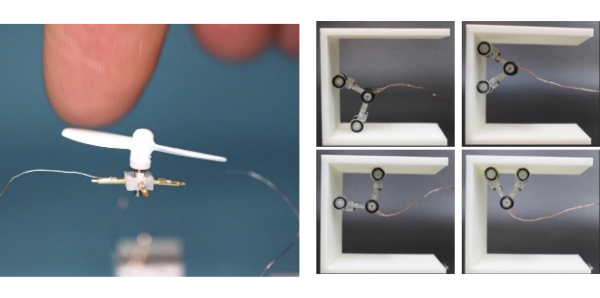
インセクトスケールロボット・バイオミメティクス
私たちが開発したマイクロ超音波モータが,実用的な性能を発揮できるようになったことで,今までは難しかった小型サイズのロボットの研究ができるようになりました.そこで,開発したマイクロモータを応用して,数ミリから数センチくらいのインセクトスケールロボットや,生物に学ぼうとするバイオミメティクス(生体模倣)の研究を行っています.例えば,全長40mmの大きさで作ったロボットは,小さな昆虫が壁面や天井を動き回るのと同じように,壁や天井を移動することができます.最近では,20mmのプロペラをもつ飛行ロボット(ドローン)の浮揚にも成功しています.このようなロボット技術は,低侵襲の医療を実施する手術支援ロボット,農業向けの昆虫型ロボット,狭いところに入って行って捜索活動をするレスキューロボットなどへの応用が期待されます.
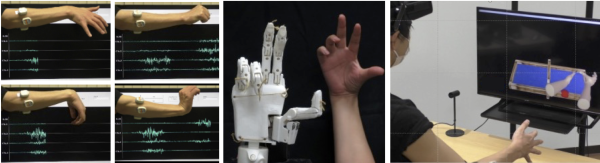
体内に流れる電気で動くロボット
事故や病気などで身体の機能を失われた肢体不自由者の自立生活支援として,生体信号と呼ばれる人体から計測できる信号で制御が可能なシステムを開発しています.例えば,筋収縮に応じて発生する筋電位を用いた義手型ロボットや,音声・脳波信号を用いて身体動作を伴わずに操作する環境制御装置などがあり,これらは独自の人工知能を用いて使用者の動作意図を学習することで随意的な制御を実現しています.また,ロボットに触覚等の感覚を持たせてより人体に近づけたり,ロボット周囲に仮想的なバリアを生成することで危険を回避したりする方法を提案しています.この他,生体信号の処理技術を応用した病症の診断支援システムや,使用者の状態を学習して状態に合わせた訓練や支援を実現するVRリハビリシステム等の研究を行っています.これらシステムの開発を通じて,ロボット技術を単に利用する社会から人とロボット/システムが共創できる社会の実現を目指しています.